Biped - Buddy
Buddy: Modular Biped Robot Project (Current Stable Release)
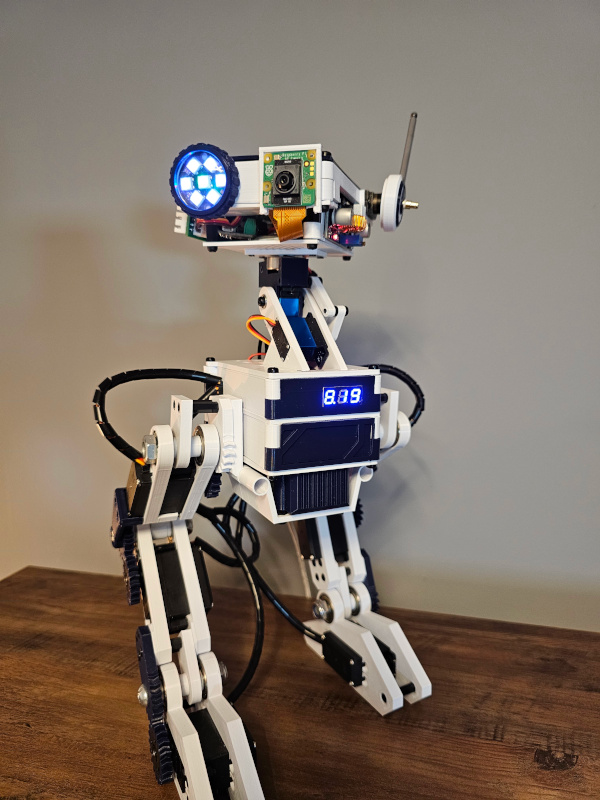
Buddy is the current stable and recommended build of the Modular Biped Robot Project from MakerForge.tech. Designed for reliability, expandability, and ease of assembly, Buddy is the ideal starting point for makers, educators, and robotics enthusiasts.
Project Overview
The Modular Biped Robot Project provides a flexible framework for robotics development using Python and C++ on the Raspberry Pi and Arduino platforms. Buddy builds on the lessons learned from the original Archie release, offering improved stability, larger build size, and enhanced features.
Key Features
- Stable Platform: Larger, more robust build for reliable operation and easier assembly.
- Modular Design: Custom PCBs for Raspberry Pi and Arduino, supporting rapid prototyping and expansion.
- Servo Control: SG5010 and TowerPro MG92B servos for leg, neck, head, and ear movement.
- Vision: Raspberry Pi-compatible camera module with wide-angle lens for vision input.
- Audio: Buzzer for simple audio output.
- Neopixel Eye: Adafruit Neopixel Jewel for expressive robot eye.
- Sensor Integration: MPU6050 accelerometer/gyroscope for balancing, RCWL-0516 microwave sensor for movement detection.
- Power Management: USB-C PD and 18650 battery support, XL4015 buck converters for safe voltage regulation.
- 3D Printed Parts: STL files available for printing the robot body, joints, and accessories.
- Open Source Code: Python and C++ code for robot control, available on GitHub.
Contributions and Discussions
We encourage active participation, contributions, and discussions from the Modular Biped Robot community. If you have any questions, ideas, suggestions, or would like to share your experiences, you can join our GitHub Discussions section dedicated to the project. It’s a great place to engage with other community members, exchange knowledge, and collaborate on the development of biped robotics.
Read more here: Community
We look forward to your participation and the exciting advancements we can achieve together in the field of modular biped robots!
Get Started
The wiki and files are available on the GitHub repository linked below: